기계 번역으로 제공되는 번역입니다. 제공된 번역과 원본 영어의 내용이 상충하는 경우에는 영어 버전이 우선합니다.
기존 에이전트 아키텍처: 인지, 이유, 행동
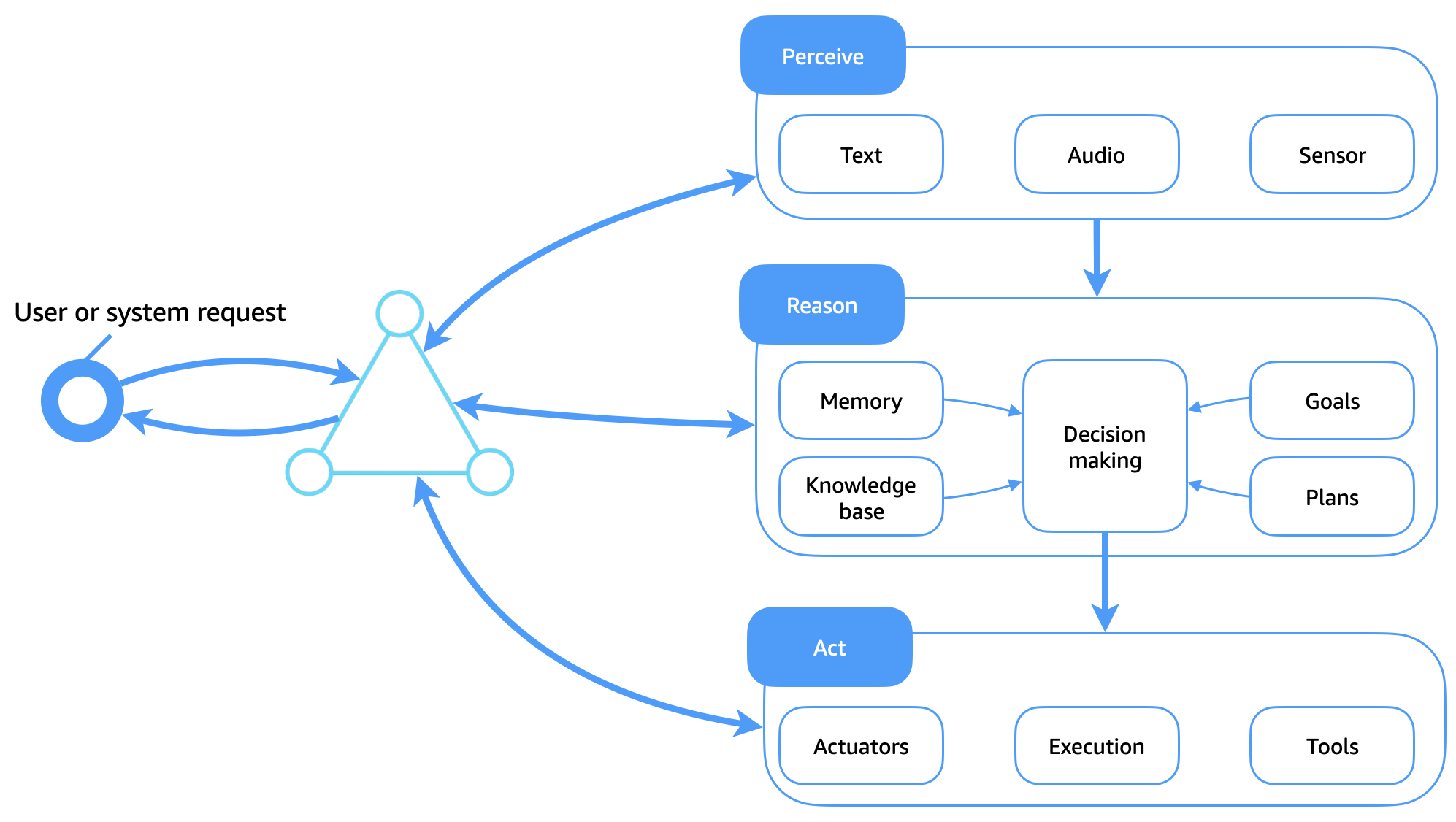
다음 다이어그램은 이전 섹션에서 설명한 빌딩 블록이 인지, 이유, 행동 주기에 따라 작동하는 방식을 보여줍니다.
인식 모듈
지각 모듈은 에이전트와 외부 세계의 감각 인터페이스 역할을 합니다. 원시 환경 입력을 추론에 정보를 제공하는 구조화된 표현으로 변환합니다. 여기에는 텍스트, 오디오 또는 센서 신호와 같은 멀티모달 데이터 처리가 포함됩니다.
-
텍스트 입력은 사용자 명령, 문서 또는 대화에서 비롯될 수 있습니다.
-
오디오 입력에는 음성 지침 또는 환경 사운드가 포함됩니다.
-
센서 입력은 모션, 시각적 피드 또는 GPS와 같은 실제 신호를 캡처합니다.
원시 입력이 수집되면 지각 프로세스가 특성 추출을 수행한 다음 객체 또는 이벤트 인식 및 의미 해석을 수행하여 현재 상황에 대한 의미 있는 모델을 생성합니다. 이러한 출력은 다운스트림 의사 결정을 위한 구조화된 컨텍스트를 제공하고 에이전트의 추론을 실제 관측치에 고정합니다.
이유 모듈
이유 모듈은 에이전트의 인지 코어입니다. 컨텍스트를 평가하고, 의도를 공식화하고, 적절한 조치를 결정합니다. 이 모듈은 학습한 지식과 추론을 모두 사용하여 목표 기반 행동을 오케스트레이션합니다.
이유 모듈은 긴밀하게 통합된 하위 모듈로 구성됩니다.
-
메모리: 대화 상태, 작업 컨텍스트 및 간헐적 기록을 단기 및 장기 형식으로 유지합니다.
-
지식 기반: 심볼 규칙, 온톨로지 또는 학습된 모델(예: 임베딩, 사실 및 정책)에 대한 액세스를 제공합니다.
-
목표 및 계획: 원하는 결과를 정의하고 이를 달성하기 위한 행동 전략을 수립합니다. 목표는 동적으로 업데이트할 수 있으며 계획은 피드백에 따라 조정적으로 수정할 수 있습니다.
-
의사 결정: 옵션을 평가하고, 장단점을 평가하고, 다음 작업을 선택하여 중앙 중재 엔진 역할을 합니다. 이 하위 모듈은 신뢰도 임계값, 목표 정렬 및 컨텍스트 제약 조건을 고려합니다.
이러한 구성 요소를 함께 사용하면 에이전트가 환경을 추론하고, 신념을 업데이트하고, 경로를 선택하고, 일관된 적응형 방식으로 행동할 수 있습니다. 이유 모듈은 지각과 행동 간의 격차를 해소합니다.
Act 모듈
작업 모듈은 디지털 또는 물리적 환경과 상호 작용하여 에이전트가 선택한 결정을 실행하여 작업을 수행합니다. 여기에서 의도가 조치가 됩니다.
이 모듈에는 세 가지 기능 채널이 포함되어 있습니다.
-
액추에이터: 물리적으로 존재하는 에이전트(예: 로봇 및 IoT 디바이스)의 경우는 이동, 조작 또는 신호와 같은 하드웨어 수준 상호 작용을 제어합니다.
-
실행: APIs 호출, 명령 디스패치, 시스템 업데이트 등 소프트웨어 기반 작업을 처리합니다.
-
도구: 검색, 요약, 코드 실행, 계산 및 문서 처리와 같은 기능 기능을 활성화합니다. 이러한 도구는 동적이고 컨텍스트를 인식하여 에이전트의 유틸리티를 확장하는 경우가 많습니다.
작업 모듈의 출력은 환경으로 다시 공급되고 루프를 닫습니다. 이러한 결과는 에이전트가 다시 인식합니다. 에이전트의 내부 상태를 업데이트하고 향후 결정을 알려 지각, 이유, 행동 주기를 완료합니다.
