本文為英文版的機器翻譯版本,如內容有任何歧義或不一致之處,概以英文版為準。
# 駕駛您的 AWS DeepRacer 車輛
[設定 AWS DeepRacer 車輛](deepracer-set-up-vehicle.md)後,您可以使用車輛的裝置主控台開始手動駕駛您的車輛,或讓車輛自動駕駛。
對於自動駕駛,您必須已訓練 AWS DeepRacer 模型,並將訓練過的模型成品部署到車輛。在自動駕駛賽車模式下,推理引擎中執行的模型會控制車輛的行進方向和速度。若沒有將訓練的模型下載至車輛,您可以使用車輛的裝置主控台來手動駕駛車輛。
許多因素都可能會影響車輛在自動駕駛時的效能。這些因素包括訓練後的模型、車輛校準、軌道條件 (例如表面摩擦力、色彩對比和光線反射) 等。若要讓您的車輛達到最佳效能,您必須確保從模擬傳輸到現實世界的模型準確、相關且具有意義。如需詳細資訊,請參閱[針對真實環境最佳化訓練 AWS DeepRacer 模型](deepracer-console-train-evaluate-models.md#deepracer-evaluate-model-test-approaches)。
## 手動駕駛 AWS DeepRacer 車輛
如果您尚未訓練任何模型,或尚未將任何訓練過的模型部署到您的 AWS DeepRacer 車輛,則無法讓它自行駕駛。但是,您可以手動駕駛它。
若要手動駕駛 AWS DeepRacer 車輛,請依照下列步驟操作。
**手動駕駛 AWS DeepRacer 車輛**
1. 當您的 AWS DeepRacer 車輛連線至 Wi-Fi 網路時,請依照[指示](deepracer-set-up-vehicle-test-drive.md)登入車輛的裝置控制主控台。
1. 在**控制車輛**頁面上,選擇**控制**下的**手動駕駛**。

1. 在 **Click or touch to drive (按一下或觸碰以進行駕駛)** 下方,按一下或觸碰駕駛盤內的位置來駕駛車輛。從車輛前方攝影機擷取到的影像會顯示在 **Camera stream (攝影機串流)** 下方的影片播放程式內。
1. 若要在駕駛車輛時開啟或關閉裝置主控台上的視訊串流,請切換 **Camera stream (攝影機串流)** 顯示下方的 **Video stream (視訊串流)** 選項。
1. 重複 **Step 3 (步驟 3)** 來駕駛車輛到不同的位置。
## 自動駕駛您的 AWS DeepRacer 車輛
若要開始自動駕駛,請將車輛置放在實體軌道上,並執行以下作業:
**自動駕駛 AWS DeepRacer 車輛**
1. 依照[說明](deepracer-set-up-vehicle-test-drive.md)來登入車輛的裝置主控台,然後執行以下作業來進行自動駕駛:
1. 在**控制車輛**頁面上,選擇**控制**下的**自動駕駛**。
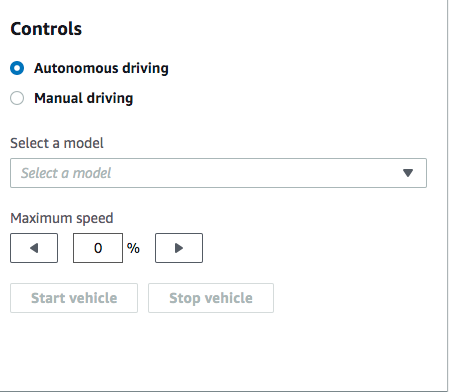
1. 從 **Select a model (選取模型)** 下拉式清單,選擇已上傳的模型。然後選擇 **Load model (載入模型)**。這會開始將模型載入推斷引擎。程序大約需要 10 秒來完成。
1. 調整車輛的 **Maximum speed (最大速度)** 設定,將其設為在訓練模型時所使用最大速度的百分比。
某些因素 (例如真實軌道的表面摩擦力) 可能會降低車輛的最大速度,使其低於訓練期間使用的最大速度。您將需要進行實驗,才能找到最佳設定。
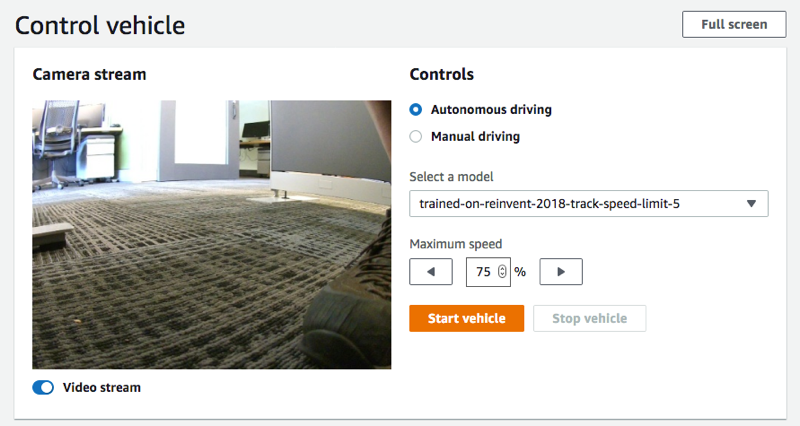
1. 選擇 **Start vehicle (啟動車輛)** 來設定車輛進行自動駕駛。
1. 若要在駕駛車輛時開啟或關閉裝置主控台上的視訊串流,請切換 **Camera stream (攝影機串流)** 顯示下方的 **Video stream (視訊串流)** 選項。
1. 觀察車輛在實體軌道上駕駛,或是透過裝置主控台上的串流影片播放程式來觀看。
1. 若要停止車輛,請選擇 **Stop vehicle (停止車輛)**。
重複 Step 3 (步驟 3) 已使用相同模型進行另一次的駕駛,或是使用不同的模型。