本文属于机器翻译版本。若本译文内容与英语原文存在差异,则一律以英文原文为准。
# 驾驶您的 AWS DeepRacer 车辆
[设置 AWS DeepRacer 车辆](deepracer-set-up-vehicle.md)后,您可以使用车辆的设备控制台开始手动驾驶车辆或让车辆自动驾驶。
对于自动驾驶,您必须训练过 AWS DeepRacer 模型并将经过训练的模型工件部署到车辆上。在自动驾驶赛车模式中,在推理引擎中运行的模型将控制车辆的行驶方向和速度。如果未将训练后的模型下载到车辆,则可以使用车辆的设备控制台来手动驾驶车辆。
许多因素会影响车辆的自动驾驶性能。它们包括训练后的模型、车辆校准、赛道条件,如表面摩擦,颜色对比和光反射等。为了使您的车辆达到最佳性能,您必须确保从模拟到真实世界的模型转换准确、相关且有意义。有关更多信息,请参阅 [针对真实环境优化训练 AWS DeepRacer 模型](deepracer-console-train-evaluate-models.md#deepracer-evaluate-model-test-approaches)。
## 手动驾驶您的 AWS DeepRacer 车辆
如果您没有训练过任何模型或尚未在您的 AWS DeepRacer 车辆上部署任何经过训练的模型,则不能让它自行驾驶。但您可以手动驾驶车辆。
要手动驾驶 AWS DeepRacer 车辆,请按照以下步骤操作。
**手动驾驶您的 AWS DeepRacer 车辆**
1. 将您的 AWS DeepRacer 车辆连接到 Wi-Fi 网络[后,按照说明](deepracer-set-up-vehicle-test-drive.md)登录车辆的设备控制控制台。
1. 在**控制车辆**页面上,选择**控制**下的**手动驾驶**。
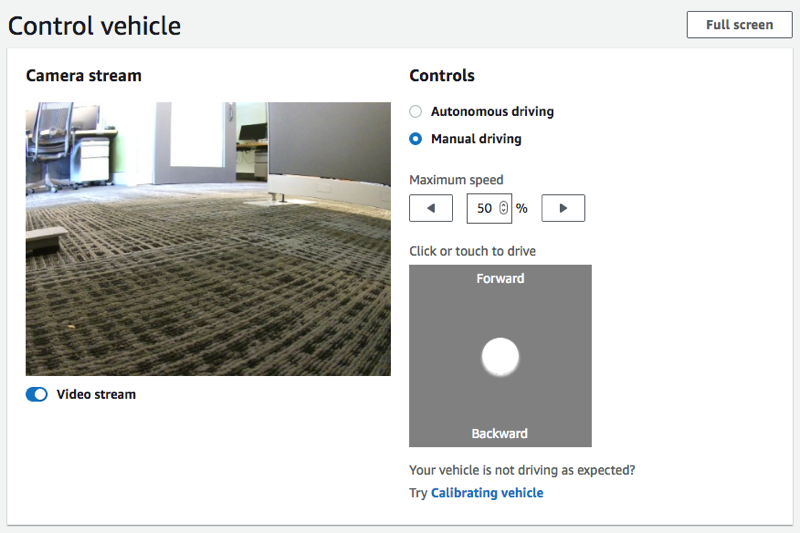
1. 在 **Click or touch to drive (单击或触摸以进行驾驶)** 下,单击或触摸驾驶板中的某个位置来驾驶车辆。从车辆前置摄像机捕获的图像显示在 **摄像机流** 下的视频播放器中。
1. 要在驾驶车辆时打开或关闭设备控制台上的视频流,请切换**摄像机流**显示屏下方的**视频流**选项。
1. 从**步骤 3** 开始重复,以将车辆驶向不同的位置。
## 自动驾驶您的 AWS DeepRacer 车辆
要开始自动驾驶,请将车辆置于物理赛道上并执行以下操作:
**自动驾驶您的 AWS DeepRacer 车辆**
1. 按照[说明](deepracer-set-up-vehicle-test-drive.md)进行操作以登录车辆的设备控制台,然后执行以下操作来实现自动驾驶:
1. 在**控制车辆**页面上,选择**控制**下的**自动驾驶**。

1. 从 **Select a model (选择模型)** 下拉列表中,选择更新后的模型。然后选择 **Load model (加载模型)**。这将开始将模型加载到推理引擎中。该过程大约需要 10 秒钟才能完成。
1. 将车辆的 **Maximum speed (最大速度)** 设置调整为训练模型时使用的最大速度的百分比。
某些因素(例如真实赛道的表面摩擦)可以从训练中使用的最大速度减小车辆的最大速度。您需要尝试找到最佳设置。
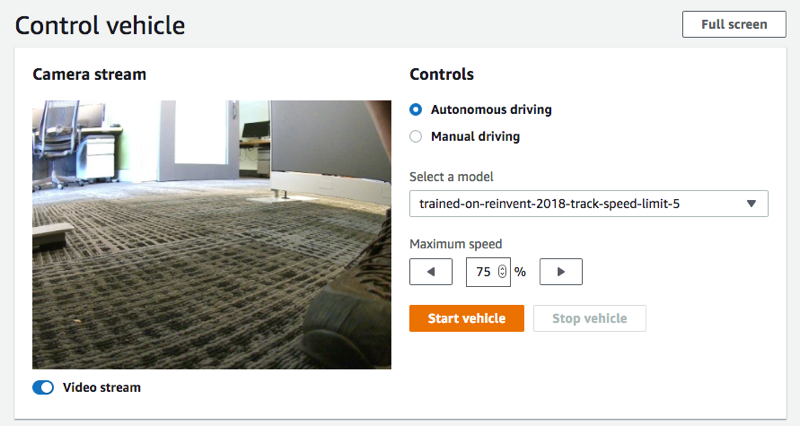
1. 选择 **Start vehicle (启动车辆)** 以将车辆设置为自动驾驶。
1. 要在驾驶车辆时打开或关闭设备控制台上的视频流,请切换**摄像机流**显示屏下方的**视频流**选项。
1. 在物理赛道或设备控制台上的流媒体视频播放器上观看车辆行驶情况。
1. 要停止车辆,请选择 **Stop vehicle (停止车辆)**。
如果要使用同一模型或不同模型开始另一次运行,请从步骤 3 开始重复。